专注全球两三轮车换电一站式解决方案
02083859919 18038691298

近年来,电动两轮车市场迎来了新的发展热潮。锂电池替代铅酸也是一种趋势。然而,锂电池的安全性不如铅酸电池。
因此,需要严格的电池管理系统(电池管理系统,BMS)来监测和保护锂电池。本文将介绍几种常见的电动自行车 BMS架构,以及不同架构的优缺点及其使用场景。
电动自行车BMS架构
图1显示了一个典型的电动自行车BMS架构。它通常由电池、模拟前端、二级保护、主控制等组成。
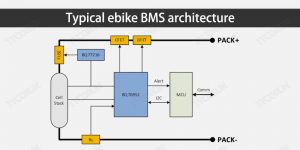
采用AFE控制MOS开关,二次保护芯片控制三端FUSE熔断,实现双重保护,真正意义上的双重保护。合格的电动自行车BMS可以通过各种功能安全认证。
电动自行车BMS架构类型
高端串行架构
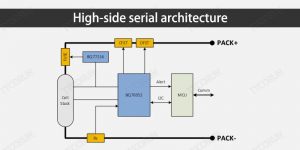
高端系列架构如图2所示。CFET和DFET都放置在高侧并串联,因此称为高侧串联架构。
优势分析:
1) BMS无需与外部通信隔离,均参考电池组-作为参考接地。2)电池组-不存在短路浪涌影响问题。
3) BMS驱动电路不存在耐压问题,并且pack-始终与B-处于相同电位。
缺点分析:
如果NMOS用于高侧控制,则需要升压电路来导通NMOS,并且gs+B+的驱动电压可以驱动NMOS导通。
这将增加升压电路的成本。如果使用PMOS电路,则控制相对简单,并且PMOS的成本大于NMOS的成本。
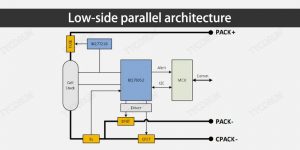
高端并行架构
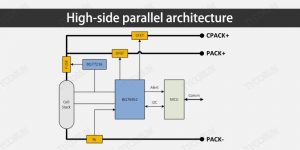
高端并行架构如图3所示。CFET和DFET都放置在高侧并并联,因此被称为高侧并联架构。
优势分析:
降低了充放电等时接口解决方案的成本,充电MOS的选择是指充电电流,而放电MOS的选择则是指放电电流。成本会更低
缺点分析:
它无法防止某些错误操作。在充电口和放电口充电会对电池造成致命损坏。
低端串联架构
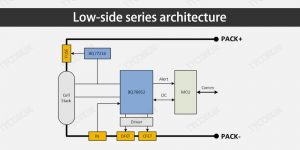
低端系列架构如图4所示。CFET和DFET都放置在低侧并串联,因此称为低侧串联架构。
优势分析:
目前使用最广泛的ebike BMS解决方案,具有低成本和简单的驱动控制。
缺点分析:
当B-和P-关闭时,有必要处理它们之间潜在的不一致性所引起的各种问题。
低端并行架构
低端并行体系结构如图5所示。CFET和DFET都放置在低侧并并联,因此称为低侧并联架构。
优势分析:
降低了充电和放电等时界面解决方案的成本。充电MOS的选择是指充电电流,而放电MOS的选择则是指放电电流。成本会更低。
缺点分析:
它无法防止某些错误操作。在充电口和放电口充电会对电池造成致命损坏。
选择合适的电动自行车BMS架构
上述四种电动自行车BMS架构的主要区别在于两点:一是CFET和DFET是放在高端还是低端;另一个区别是CFET和DFET是串联连接还是并联连接。
根据不同的应用场合,应选择合适的电动自行车BMS架构。以下介绍了选择不同电动自行车BMS架构时的主要注意事项。
高端或低端
低端解决方案目前是一种相对成熟且易于实施的解决方案,大多数两轮车也是基于低端解决方案设计的。同时,目前大多数模拟前端也集成了低端驱动功能。
然而,低侧保护方案有一个缺点:当CFET和DFET关闭时,一旦触发保护以关闭充放电FET,电池侧和系统侧就无法再实现直接通信。

与低侧保护方案相比,即使在触发保护后,电池组和系统侧仍然是公共接地。
因此,在不增加孤立通信的情况下,仍然可以实现相互通信。并在触发保护后断开蓄电池的正极端子,系统更加安全。
串联或并联
串联架构的充电端口和放电端口共用一个端口,但缺点是CFET和DFET的数量需要根据充电和放电电流的最大值来选择。
如果充电电流和放电电流之间的差相对较大,例如,普通电动汽车锂电池组的充电电流小于放电电流,并且如果选择串联结构,则需要选择比实际需要更多的CFET,从而导致不必要的浪费。
与串联架构相比,并联架构可以根据实际充放电电流需求选择CFET和DFET的数量和类型。
缺点是需要考虑反向电流,例如通过DFET的体二极管流到电池芯。
为了阻断这些电流路径,需要额外的电路辅助。此外,并行架构需要一条额外的电源线和一个额外的端口,这不适合某些场合。
其他ebike BMS架构
除了根据CFET和DFET的位置进行上述分类外,ebike BMS架构还可以根据模拟前端的数量、是否有MCU等进行分类。
级联架构
根据模拟前端的数量,电动自行车BMS可以分为级联架构和非级联架构。
目前主流的电动自行车 BMS,如电动自行车、踏板车和自平衡车,通常使用10S、14S或16S电池组,BQ769x2可以支持它们。因此,对于目前主流的电动自行车BMS,可以使用上述单一AFE解决方案。
图2~图5均为非级联架构。然而,对于一些需要相对大功率的应用,例如电动轻型摩托车或电动摩托车,电压通常高于60V。
需要使用高于16串的电池组才能获得更大的功率,单个BQ76952不足以支持。需要使用两个芯片级联使用,即采用级联电动自行车BMS架构。
独立架构
根据MCU的存在与否,电动自行车BMS可分为独立架构和非独立架构。图2~图5都使用MCU,所以它们都是非独立的架构。
在图7中,AFE独立于MCU工作,因此它是一个独立的体系结构。当BQ769x2在独立模式下工作时,它仍然可以监测电池状态并控制充电和放电FET。
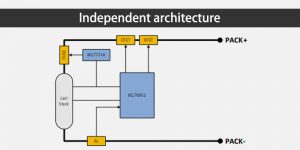
当保护条件被触发时,FET被自动控制为关断以实现保护,并且当保护条件解除时,FETs被自动恢复为导通。
独立电动自行车 BMS架构的优点是可以节省一个MCU,适用于成本要求严格的应用。然而,由于缺乏MCU,灵活性有所损失。用户需要根据实际需求选择独立或非独立的电动自行车 BMS架构。
总结
随着电池交换模型变得更加复杂,用户可以期待电动自行车电池管理系统(BMS)在不久的将来变得更加高效和划算。更先进的BMS技术的发展也将延长电池寿命、提高性能和提高安全性。

电话:02083859919 手机:18038691298
公司地址:广州市黄埔区光谱西路TCL创意产业园530室 邮箱542298629@qq.com
Copyright @ 2026 广州太空人新能源科技有限公司 版权所有 ICP备案:粤ICP备2023005659号-1No:76990
